Model Based Design
Model Based Design is a visual modular approach for embedded systems engineering. The model is an executable specification, unambiguous and not open to interpretation. It can span multiple domains, including mechanical, hydraulic, electrical, and software components.Production ready embedded C/C++ code can be automatically generated from the model, avoiding costly and error-prone re-coding for deployment. Benefits include faster development cycles, with most bugs found early in the design phase, and fewer latent bugs. Companies that adopt Model-Based Design report time and productivity increases from 20% to 60% (Barnard P. AIAA 2005: Software Development Principles Applied to Graphical Model Development)
We use the method to accurately design, implement, and simulate:
- Control systems
- Signal processing systems
- Electronics and power systems
- Other dynamic systems
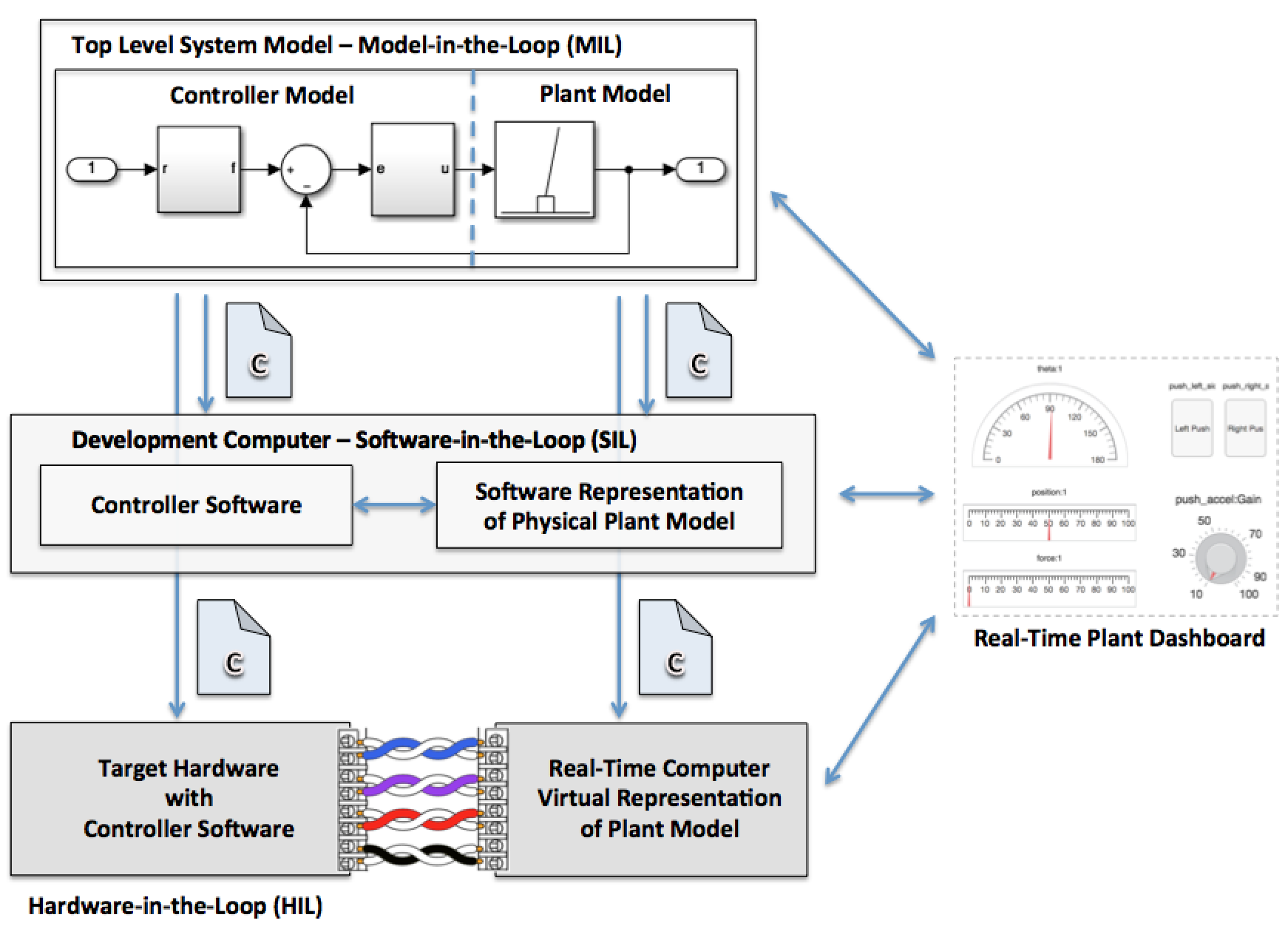
- Model-in-the-loop (MIL) Testing: tests the Simulink algorithm running as a simulation.
- Software-in-the-loop (SIL) Testing: tests generated code running on your development computer.
- Hardware-in-the-loop (HIL) Testing: tests generated code running on target hardware against a simulated environment in real time.
Our capabilities include:
- Audio Systems (dynamic range control, effects, filters, sinks, sources).
- Communications Systems (channels, equalizers, modulation, encoding, synchronization, etc).
- Image Aquisition (video device input block).
- Computer Vision (analysis, enhancement, conversion, text and graphics, etc).
- DSP Systems (estimation, filtering, quantizers, operations, FFT, DCT, DWT, etc).
- Instrumentation Control (serial TCP/IP and UDP send and receive, query instrument, etc).
- Model Predictive Control (adaptive and MPC controllers).
- Robotics (get and set parameters, publish, subscribe, messaging, etc).
- Design Optimization (check against reference, bounds, and response characteristics).
- System Identification (estimators and models).
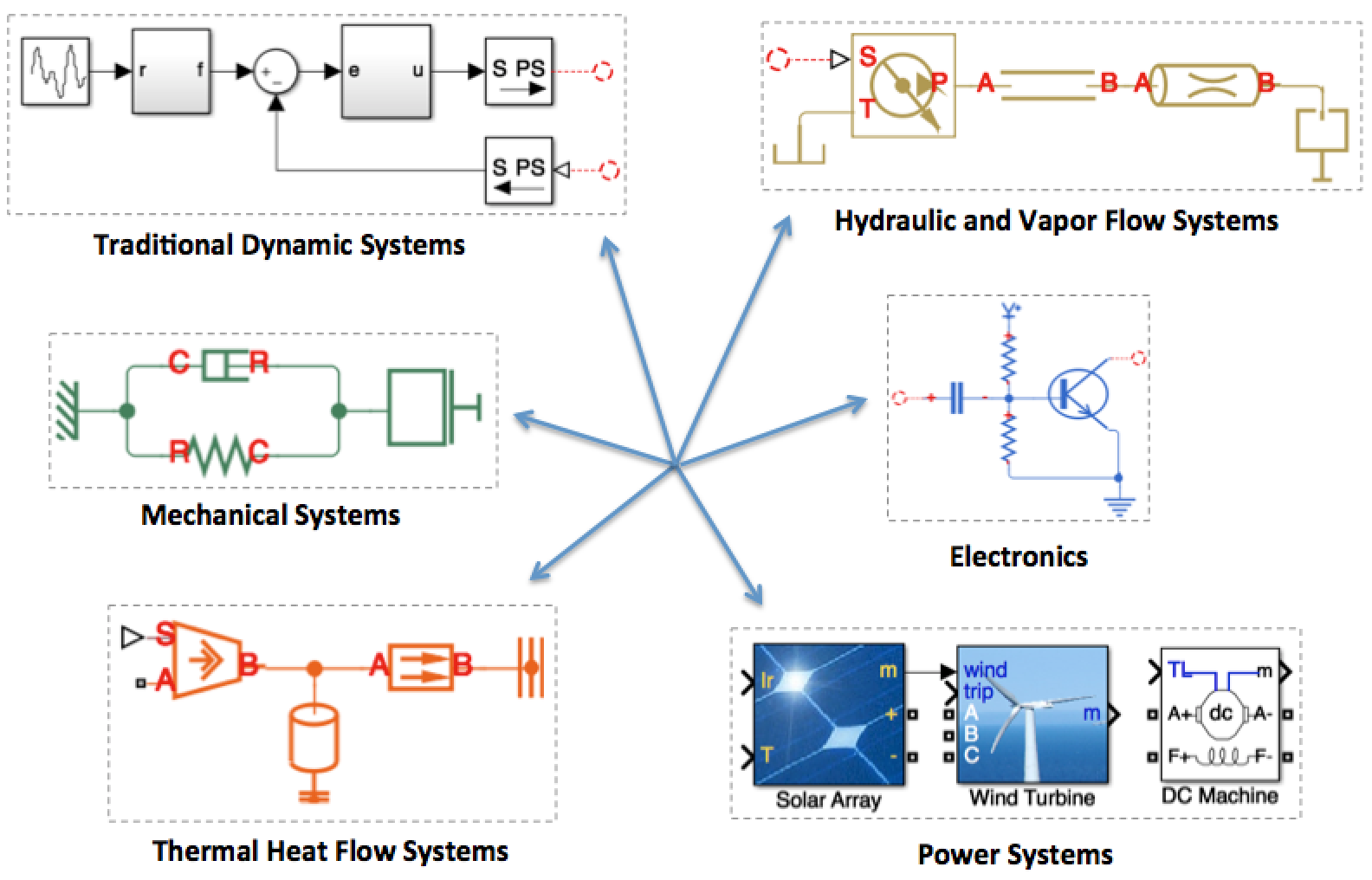
Multi-Domain Physical Models
Models can include multi-domain physical models, including mechanical, hydraulic, thermal, electronic, and power systems components which can all interact with eachother during simulation and testing.
We have a licence for the following multi-domain blocksets:
- Simscape (foundation library for mechanical, hydraulic, and thermal systems).
- Simscape Electronics (passive devices, semiconductors, logic gates, sensors, etc).
- Simscape Power Systems (machines, transformers, tramsmission lines, power electronics, etc).
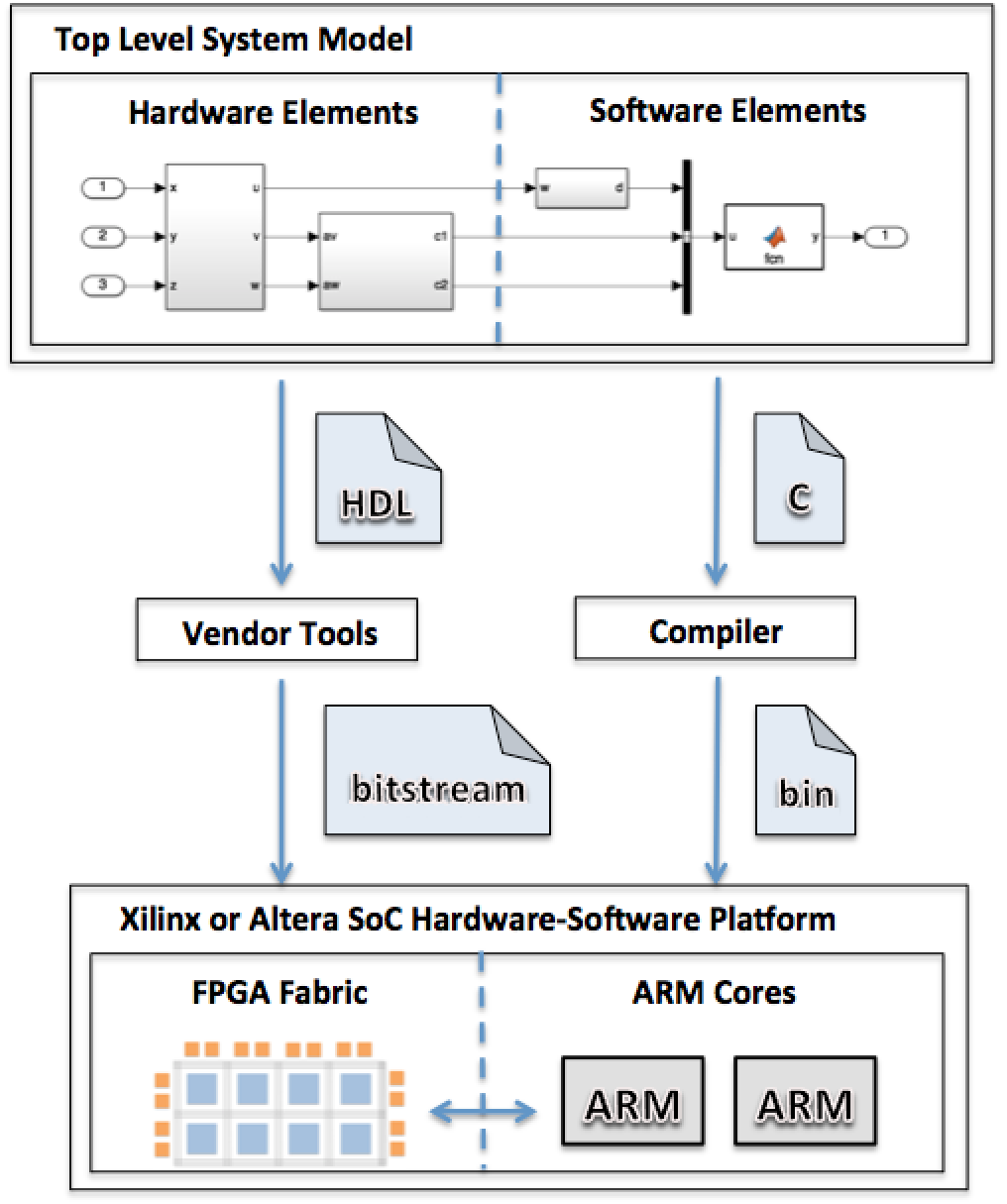
Hardware-Software Co-Development
Model based design also supports hardware-software co-development with FPGA System-on-a-Chip (SoC) boards from Altera and Xilinx. The design is defined in Simulink, with elements of the model partitioned into two groups, one targeting the FPGA fabric (hardware), the second targeting the ARM cores (software) side of the chip.
We have the following HDL-ready blocksets to support delivery of royalty-free FPGA applications:
- Communications Systems (filters, modulation, multiplexing, etc).
- Digital Signal Processing (DSP) Systems (FFT, filtering, transformatins, etc).
- Machine Vision Systems (streaming, image and video processing algorithms, etc.).
- General Purpose Blocks (discontinuities, math and logic operations, routing, lookup tables, etc).
MATLAB is a registered trademarks of The MathWorks, Inc.